Avant de réaliser toute manipulation sur votre drone FPV, il est crucial de sauvegarder les données d’origine de votre drone. Cela vous permettra de revenir en arrière en cas de mauvaise manipulation.
Mise à jour du firmware avec Betaflight Configurator
Flasher votre FC (contrôleur de vol) sur Betaflight consiste à mettre à jour le firmware afin qu’il dispose de la dernière version logicielle du constructeur. Dans notre exemple, nous utilisons une MATEK F405-CTR.
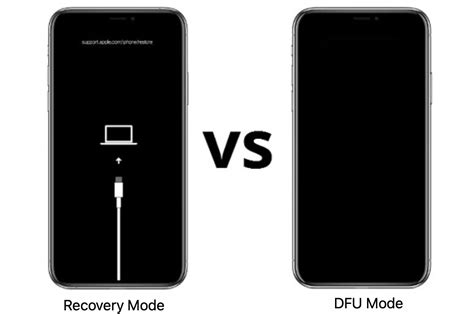
Mode DFU (Bootloader)
Pour réaliser la mise à jour, vous devez placer votre contrôleur de vol en mode DFU (Device Firmware Upgrade), également appelé mode bootloader.
Configuration de base dans Betaflight Configurator
Une fois Betaflight Configurator installé et votre drone connecté, plusieurs onglets vous permettront de paramétrer votre appareil.
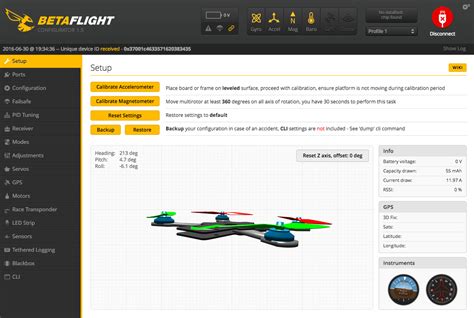
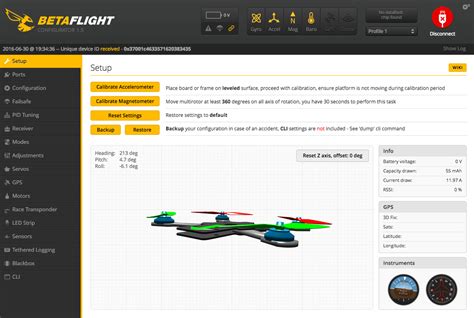
Onglet "Installation" : Calibration de l'accéléromètre
Il ne faut pas hésiter à calibrer votre accéléromètre dans l’onglet “Installation”. L’accéléromètre permet de mesurer l’accélération linéaire du drone sur 3 axes (X/Y/Z).
Pour calibrer votre accéléromètre, vous devez positionner votre châssis à plat sur une surface stable et cliquer sur le bouton “calibrer”. Assurez-vous que rien ne bouge pendant le calibrage, cela devrait prendre quelques secondes.
Vérifiez également si votre FC est dans le bon sens : penchez le drone en avant, et le drone affiché sur l’onglet ”Installation” doit également pencher en avant.
Onglet "Port" : Assignation du récepteur (Rx) à un UART
Dans la colonne “Serial Rx”, cochez le petit bouton pour l'UART auquel votre récepteur est connecté. Il doit passer au jaune.
Onglet "Configuration" : Fonctionnalités importantes
Dans cette partie de Betaflight, vous pourrez configurer une majeure partie de votre multirotor.
Champ "Autres fonctionnalités"
- TELEMETRY : Activez la télémétrie pour récupérer les informations des capteurs de votre contrôleur de vol sur votre radiocommande.
- AIRMODE : L’Airmode doit être activé car il permet à votre drone de garder la même trajectoire lorsque vous lâchez les commandes.
Champ "Fonctionnalités ESC/Moteur"
- “Protocole ESC/moteur” : Il s’agit du langage utilisé pour la communication entre l'ESC (Electronic Speed Controller) et la FC. Il est recommandé de consulter la fiche produit de vos ESC pour connaître le protocole supporté.
- Les protocoles OneShot et MultiShot sont plus anciens que le protocole Dshot. Si vous disposez du Dshot, privilégiez le Dshot300 ou Dshot600. Choisir un protocole plus élevé pourrait endommager vos ESC.
- Dans le cas où vos ESC ne supportent pas le Dshot, optez pour du OneShot125 voire du Multishot.
Les ESC pour les débutants (Dshot 600, multishot / signal numérique, analogique)
Onglet "Alimentation et batterie" : Paramétrage de la LiPo
Betaflight peut signaler au pilote l’état actuel de la LiPo et indiquer s’il peut continuer à voler.
- “Batterie” :
- “Tension Mini par élément” : 3,75 Volt par cellule. Une fois ce niveau atteint, il est conseillé de se poser pour préserver la batterie.
- “Tension Maxi par élément” : 4,2 Volt par cellule.
- “Tension d’avertissement par élément” : 3,70 Volt par cellule.
Pour réaliser vos premiers vols, la configuration de cette partie n'est pas strictement obligatoire, mais elle est fortement recommandée pour la santé de vos batteries.
Onglet "Récepteur" : Vérification des voies
Pour pouvoir naviguer dans cet onglet, vous aurez besoin de connecter une LiPo à votre drone afin d’alimenter votre récepteur. Ne laissez pas la batterie trop longtemps connectée au drone sans surveillance.
Important : Ne branchez jamais une Lipo sans avoir mis une antenne à votre VTX (émetteur vidéo) et à votre récepteur. Cela représente un risque élevé de brûler vos composants !
Vérifiez que toutes les voies (Roll [A], Pitch [E], Yaw [R], Throttle [T], AUX 1, AUX 2, etc.) fonctionnent et correspondent bien aux mouvements de votre radiocommande.
Onglet "Modes" : Configuration des interrupteurs
L’onglet “Modes” est destiné à assigner des fonctions spécifiques à vos interrupteurs (switch) de radiocommande, comme l’activation d’un buzzer ou l’armement des moteurs.
Je vous conseille d’activer les modes suivants :
- PREARM : Le prearm constitue une sécurité supplémentaire pour armer (activer) les moteurs. Il évite un armement accidentel si vous manipulez le drone en main.
Test des moteurs
Avant de tester les moteurs, veillez à retirer vos hélices de votre drone. Cochez le bouton “Je comprends les risques”.
Par la suite, testez vos moteurs un par un. Assurez-vous que la valeur E reste à 0% lorsque vous n'utilisez pas le curseur blanc. Utilisez le curseur blanc pour faire tourner le moteur et vérifier qu'il n'y a pas d'erreur. C'est également l'occasion de vérifier si le bon moteur tourne.
Onglet "OSD" : Affichage des informations en vol
L’onglet “OSD” (On-Screen Display) est l’une des parties les plus importantes pour voler avec votre drone. Il permet d’afficher des informations clés dans vos lunettes ou masque FPV (niveau de la batterie, etc.).
À minima, vous devez activer les informations suivantes :
- “Avertissements” : Indique les raisons pour lesquelles le drone ne peut pas être armé (signal GPS absent, etc.).
- “Direction point de décollage” : Une petite flèche indiquant votre point de départ.
- “Distance du point de décollage” : La distance entre vous et le drone.
- “Latitude GPS” + “Longitude GPS” : Ces coordonnées GPS seront très utiles pour retrouver votre drone en cas de perte.
Pour voir les bonnes données dans votre VTX, vous devez avoir la clé de débogage Smartaudio activée.
Configuration de la bande vidéo
Vous aurez le choix entre SmartAudio 2.0 (USA) ou SmartAudio 2.0 (EU).
- Champ “Choisir le mode” :
- Bande : Choisissez “RACEBAND” car il s’agit de la bande la plus espacée en termes de fréquence.
- Canal : Sélectionnez le canal de votre choix.
Diagnostic des problèmes d'armement
BetaFlight 3.2 et les versions ultérieures apportent des améliorations pour le diagnostic des drones qui refusent de s'armer. Le contrôleur de vol indique désormais clairement la raison de ce blocage.
Les différentes raisons, appelées "flags", peuvent inclure :
- Aucun gyroscope n’est détecté.
- Aucun signal valide du récepteur n’est reçu par la FC.
- En cas de sortie de failsafe avec l’interrupteur d’armement actif.
- La charge du processeur de la carte de vol est trop élevée.
Ces critères de blocage d'armement sont affichés dans la commande `status` (en CLI), sur l'OSD et dans l'interface de configuration de BetaFlight.
Conseils et remarques
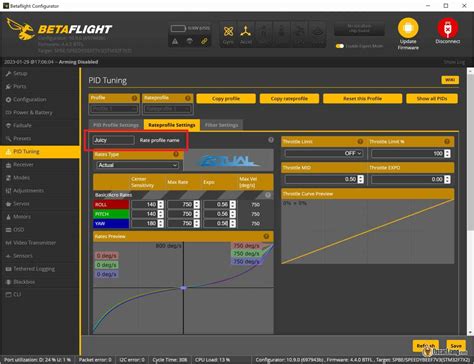
- Pour réaliser vos premiers vols, la configuration avancée des PID n'est pas obligatoire, mais elle fera l'objet d'articles plus complets.
- Une mauvaise configuration des PID, notamment du terme intégral (I), peut empêcher le drone de monter droit, même à plein gaz.
- Si vous effectuez une mise à jour majeure du firmware, il est souvent nécessaire de reparamétrer le drone. Il est conseillé de prendre des notes ou des captures d'écran avant pour faciliter la reconfiguration. Avec l'habitude, la configuration de Betaflight devient rapide.
Les ESC pour les débutants (Dshot 600, multishot / signal numérique, analogique)
tags: #betaflight #armer #quad #pas #droit